근래 도입되고 있는 대부분의 도시철도 신호시스템은 통신기반열차제어(CBTC)에 기반한 무인운전시스템이다. 이러한 무인운전 시스템은 기관사(운전자)가 열차에 탑승하지 않고 운영됨으로, 차량 고장 발생 시 적재적소에서 종합관제센터(OCC)가 이에 대처하고 해결할 수 있는 운영 시나리오의 개발도 필수로 요구되고 있다. 열차를 더욱 안전하고 효율적으로 운영할 수 있는 무인운전 시스템은 무엇이며, 해당 시스템 운영에 필수 요소로 꼽히는 CBTC 기반의 무인운전시스템의 운영 시나리오 개념 및 운영모드는 어떤 것이 있는지 알아본다.
철도 차량 무인운전 시스템의 개념
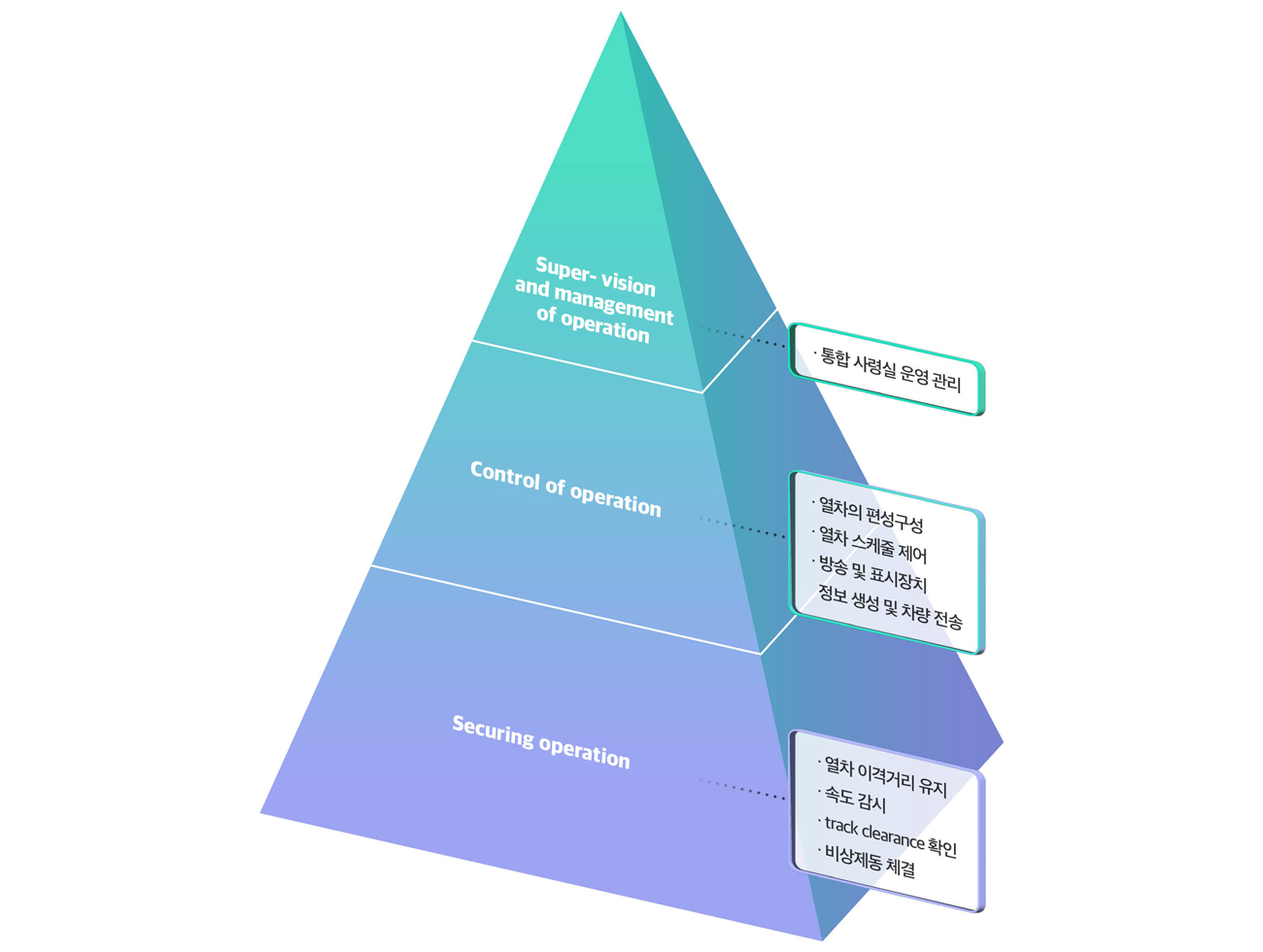
철도차량 무인운전 시스템은 운행하는 열차의 제어를 기관사가 아닌 종합관제센터가 맡는다. 열차의 편성부터 열차 스케줄, 탑승객들에 정보 전달을 위한 방송 및 표시장치 송출 역시 종합관제센터에서 수행하게 된다. 열차가 역에 정차해 탑승객의 승차를 위해 문을 여닫고 출발하는 과정부터 안전운행을 위한 앞, 뒤 열차와의 간격 조정, 열차의 속도 감시 뿐 아니라 열차의 선로 이용에 대한 통제나 긴급한 상황에서 열차의 비상제동도 종합관제센터가 판단해 수행한다.
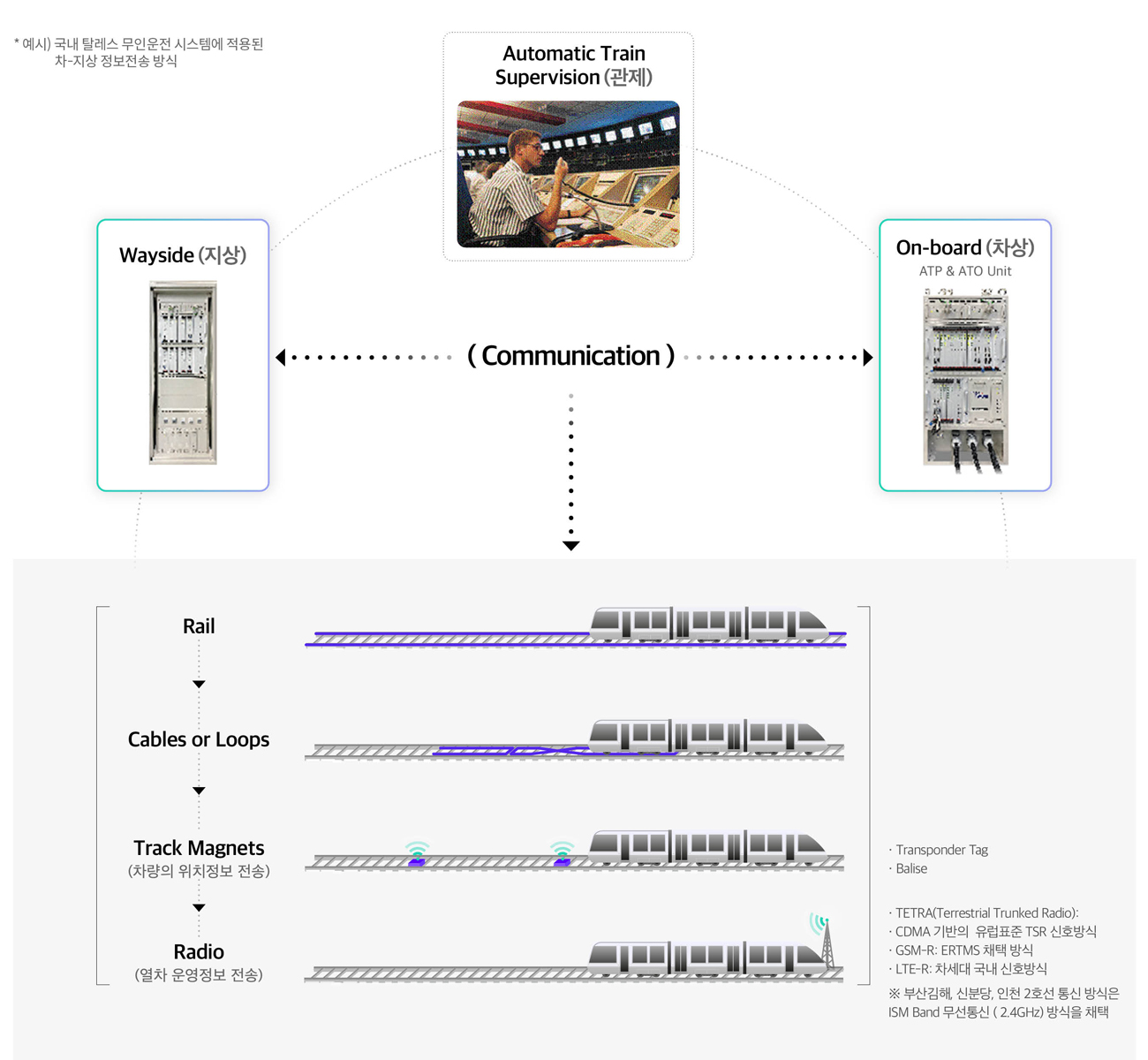
열차 내 기관사가 아닌 종합관제센터가 열차를 제어할 수 있는 이유는 열차의 무선근거리통신 기술을 통해 열차 운영에 대한 다양한 정보를 멀리서도 충분히 모니터링할 수 있기 때문이다. 선로 위의 각종 센서와 열차 내외부의 통신 장비 간의 상호 커뮤니케이션이 가능한 시스템을 구축하고 있기 때문에 종합관제센터에서는 이를 바탕으로 열차의 주행, 정차 여부를 판단할 수 있고, 열차 운행 관련 정보를 열차 이용객들에게 안내할 수 있는 것이다. 간혹 열차의 무인운전 시스템을 자동차의 자율주행과 혼동하는 경우가 있는데, 자율주행은 사람의 도움 없이 라이다(Ridar) 센서 등을 활용해 주변 환경을 인식해 차량 스스로 상황을 판단하고 주행하는 기술인 반면, 열차의 무인운전은 신호시스템과 무선통신시스템을 통해 종합관제센터에서 사람이 원격 제어한다는 점에서 차이가 있다.
철도차량의 자동화 레벨(Grades of Automation)

무인열차 시스템 자동화 등급의 분류는 국제 표준(IEC 32290-1)에 따라 위 표와 같이 4단계로 나뉜다.
GoA 1 : Usually applied as a fallback Operation Mode
GoA1 등급의 자동화 단계에서 기관사는 열차의 전두부 운전실에서 선로를 주시하며 위험 상황이 발생하는 경우 열차를 정지시켜야 한다. 차상신호시스템의 신호에 따라 기관사가 가감속을 지시하며, 시스템은 기관사의 운전을 보조한다. 출입문 닫힘을 포함하여 역에서의 안전한 출발 역시 기관사의 역할이다.
GoA 2 : Semi-automated Operation Mode, STO
GoA2 등급의 자동화 단계에서 기관사의 역할은 기본적으로 GoA1과 동일하다. 다른 점은 열차의 가감속을 시스템이 자동으로 수행하며, 열차 속도 역시 시스템에 의해 감시된다.
GoA 3 : Driverless Train Operation, DTO
GoA3 등급의 자동화 단계에서는 운전실 내 기관사가 없어도 운행이 가능하다. 열차의 속도 제어 및 정차와 출발 모두 시스템에 의해 이뤄진다. 출입문의 개폐 역시 시스템에 의해 수행될 수 있다. 하지만 비상 상황 발생 시에는 열차 내 탑승한 운영자의 개입이 필요하다.
GoA 4 : Unattended Train Operation, UTO
GoA4 등급은 모든 상황을 시스템이 관리하는 자동화 단계다. 열차 내 탑승한 운영자가 없기 때문에 출입문의 닫힘을 포함해 역에서의 안전한 출발 등을 자동으로 수행한다. 해당 등급은 시스템이 비상 상황 발생 시, 비상조건의 감지 및 관리도 자동으로 수행이 가능하다.
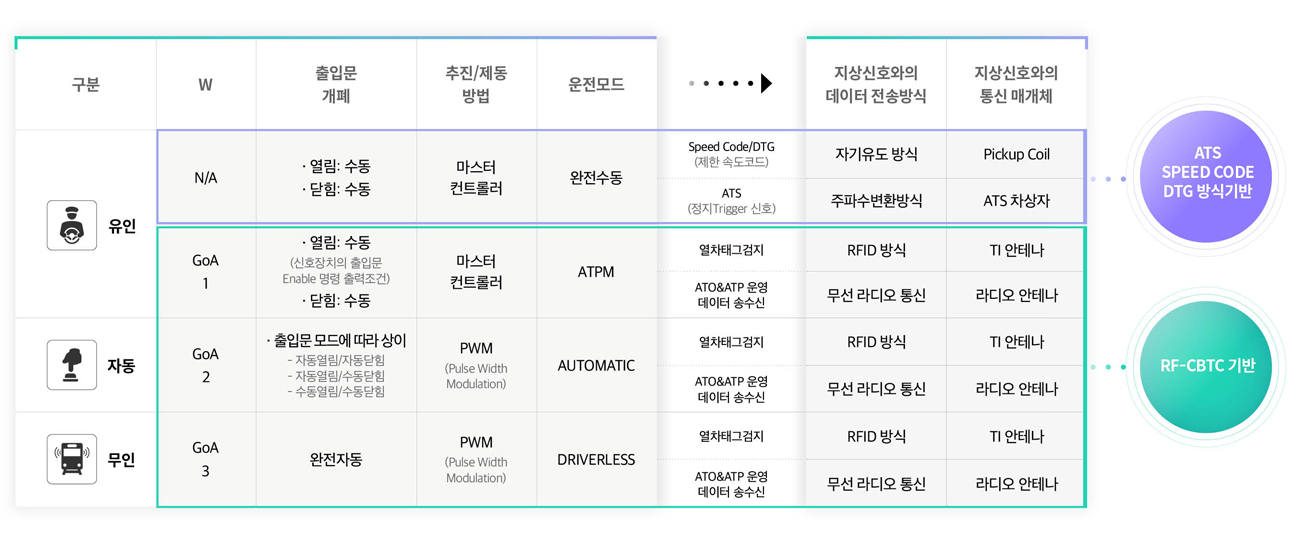
열차 운영모드의 차이는 기관사의 탑승 유무, 운전자의 직접 제어 수준에 따라 위 그림과 같이 구분할 수 있다. 기관사가 존재할 경우 대부분의 항목을 기관사가 직접 제어하지만, 기관사가 없는 경우 시스템이 이를 대체해야 하기 때문에 해당 부분을 제어하기 위한 시스템이 갖춰져야 한다. 가령 무인열차 운행 중 열차가 역 승강장의 정위치에 정차하지 못할 때 출입문 제어는 다음과 같은 로직으로 수행된다. 열차가 정위치 정차 지점에서 3.125m 이상 미주 또는 과주했을 때 열차는 자동 정렬을 수행해 열차 재정렬 후 출입문을 개폐하는 방식이다.
철도차량 무인운전과 운영 시나리오
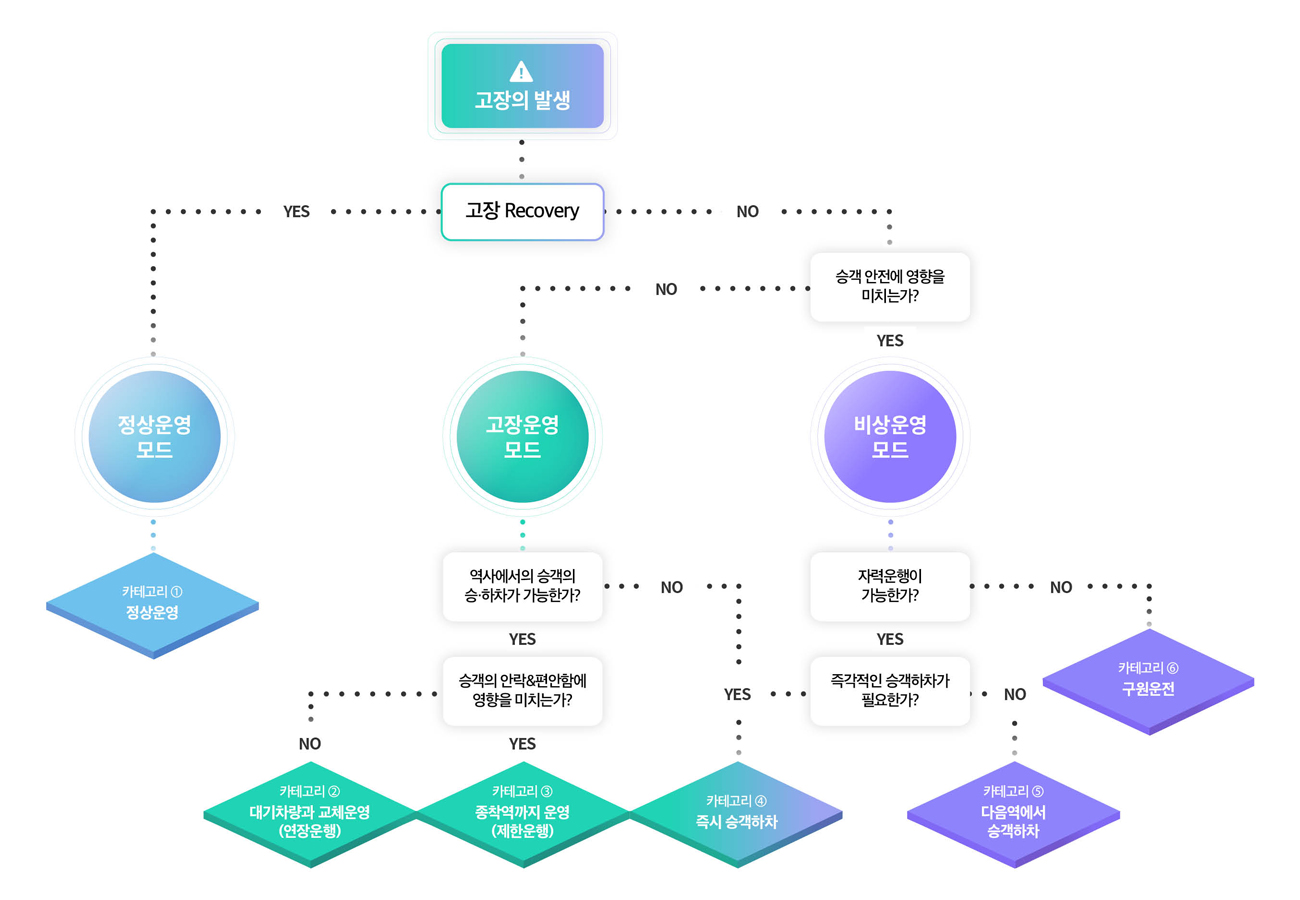
열차의 무인운전 운영 시나리오는 정상, 고장, 비상 등 3가지 모드로 구분할 수 있다. 정상모드에서는 어떠한 이벤트(고장, 사고 등)가 발생했을 때 그 정도가 미미해 지속 운행이 가능하거나, 해당 이벤트가 차량 시스템의 고장일 경우 중앙관제센터의 원격 제어 또는 열차 내 운영자를 통해 복구 후 정상 운행을 지속할 수 있다.
고장모드에서는 발생한 고장의 복구가 불가할 경우 해당 고장에 대한 승객 안전성 확보를 우선 판단한다. 승객 안전에 직접 영향을 미치지 않는 고장일 경우에는 중앙관제센터의 지시에 따라 빠른 고장 조치 후 제한적으로 열차를 운행한다. 발생한 고장이 차량 시스템의 고장일 경우 기본적으로 종착역까지의 운행을 권장하지만, 그 고장이 승객 편의성에 미치는 영향 등을 종합적으로 판단해 일정 역까지 연장 운행 후 대기 차량과 교체할 수 있다. 차량 외부 시스템의 고장은 대부분 외부적인 요인에 의해 발생함에 따라, 원인을 찾아도 빠르게 조치할 수 없기 때문에 해당 구역에서의 운행이 제한될 수 있다.
비상모드는 발생한 고장이 승객 안전에 직접적인 영향을 주는 경우로써, 차량 시스템 고장은 승객 하차 후 기지 환송을 전제로 하며 해당 고장의 정도에 따라서 즉시 승객하차 또는 다음 역 하차로 구분한다. 승객 하차 후 자력으로 기지 환송이 불가능할 경우 구원운전 절차에 따른다.
하단의 표는 상기 운영모드 중 고장모드에 대하여 차량의 중요 고장 시나리오별 카테고리로 구분한 권장 운영 프로세스 예시다.
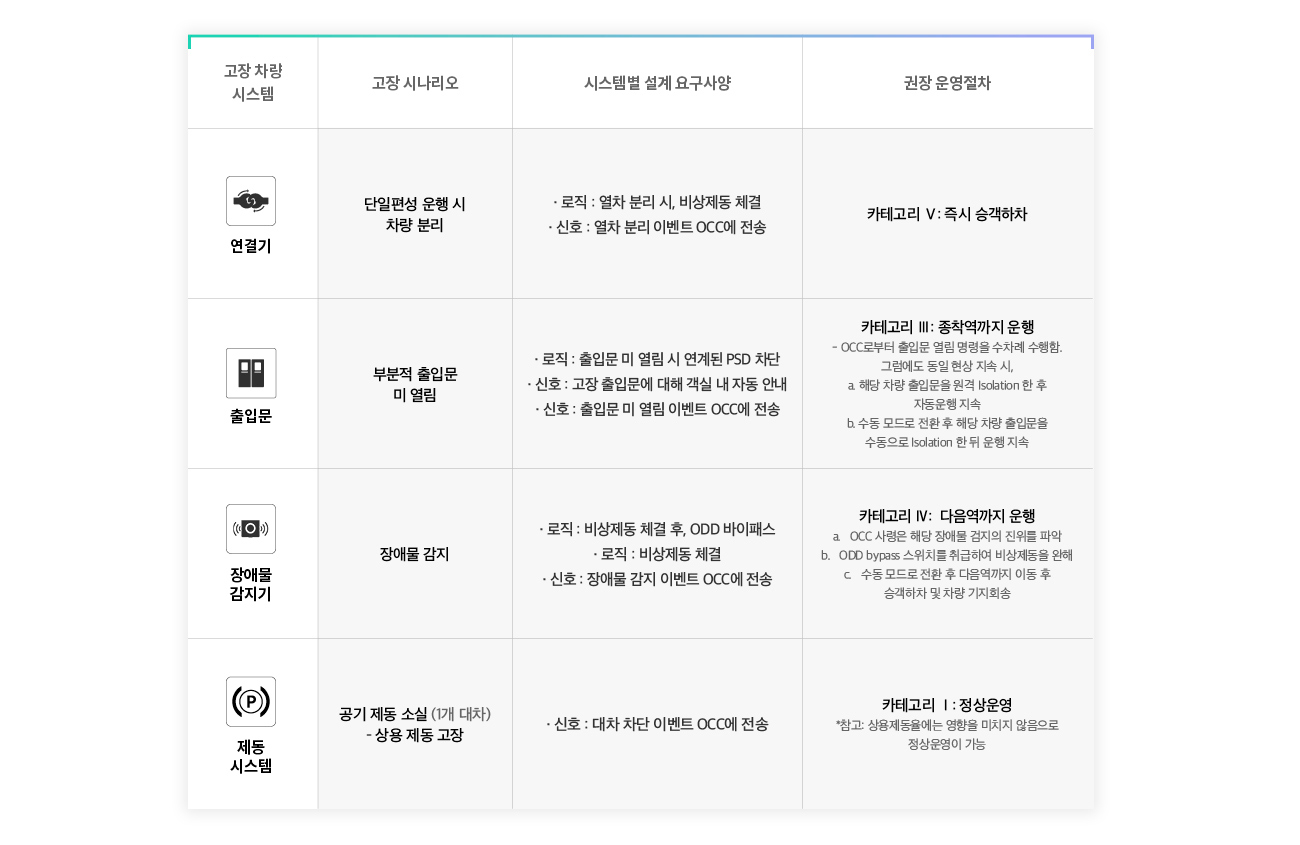
철도차량의 무인운전 시스템은 차량 내 운영자가 없기 때문에 고장이 발생하면 고장 상황별로 빠른 대응 및 고장소거 조치를 통해 승객의 안전을 보장하고 편안한 열차 이용 환경을 제공해야 한다. 이를 위해서는 중앙관제센터와 차량 내(외)의 운영자와 유기적으로 협업해 그 효율성을 확보해야 한다. 운영 시나리오 모드를 구분하고, 고장 상황별 대응 프로세스를 구축하는 것은 철도 차량 무인운전의 운행 안전성을 더욱 높일 수 있는 방법이다. 이러한 이유로 무인열차 시스템 설계 단계에서 상세한 고장유형 분석을 통해 차량 및 신호 설계에 대한 요구사양을 반영하고, 이를 바탕으로 빠른 시간 내 안전이 보장되도록 운영 절차를 수립하는 것이 매우 중요하다.