
Most recent urban rail signaling systems are automated systems based on communication-based train control. These automated systems operate without a driver on board the train, and so they require the development of operating scenarios for the right person in the right place at the operation control center (OCC) to handle and resolve vehicle failures. We will discover what automated systems that can more safely and efficiently operate trains are, as well as the automated driving system operating scenario concepts and operating modes based on CBTC, an essential element in this system’s operation.
Concept of a Railway Car Automated Driving System
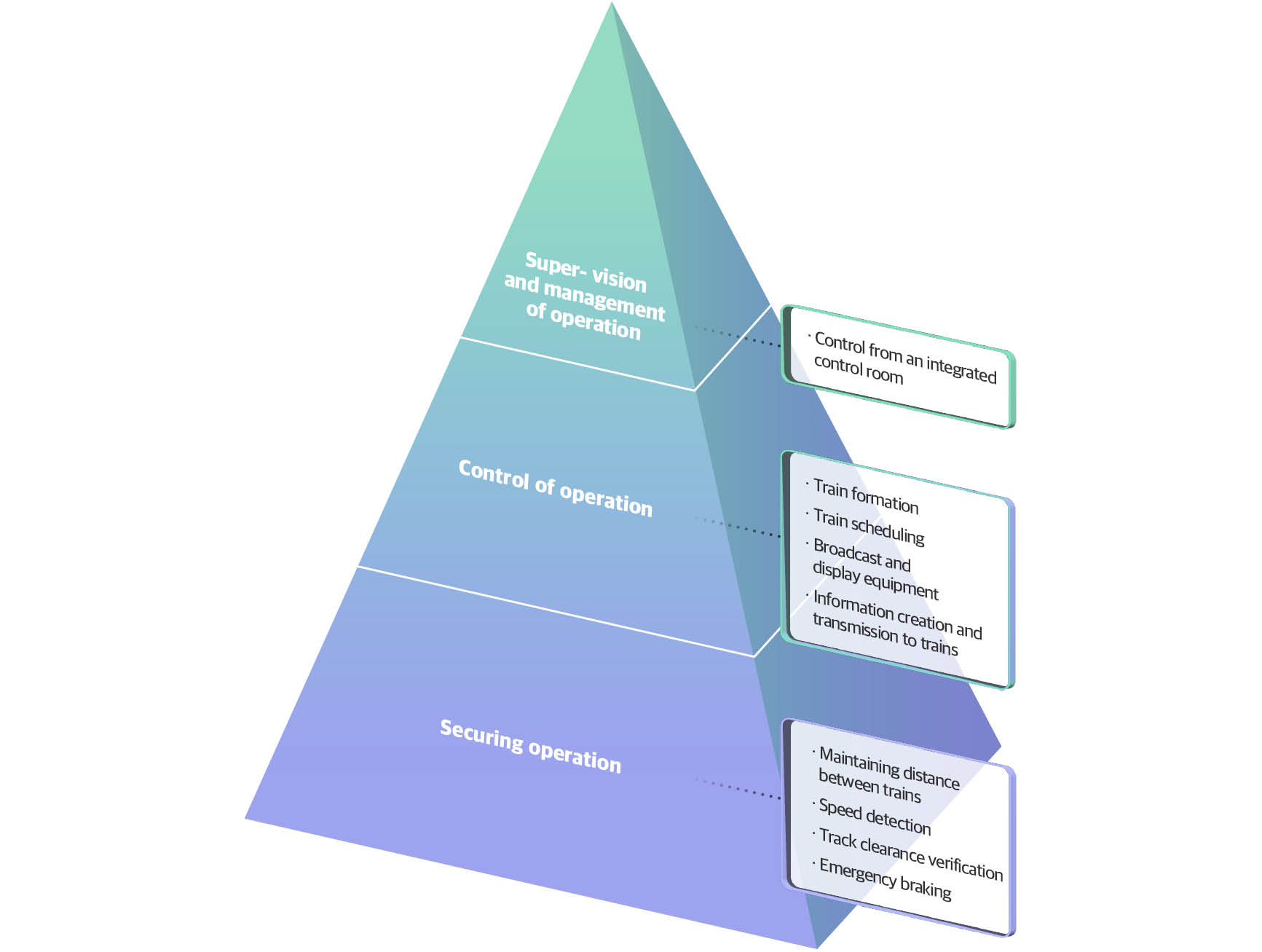
Railway car automated driving systems give control of the operating trains to an integrated control center rather than a driver. The control center manages everything from formation to scheduling as well as broadcasts and displays to provide information to passengers. The control center also judges and manages trains stopping at stations and opening and closing doors to let passengers embark and disembark before departing, maintaining distance at both ends of the train for safety, detecting train speed, and control of track use as well as braking in emergency situations.
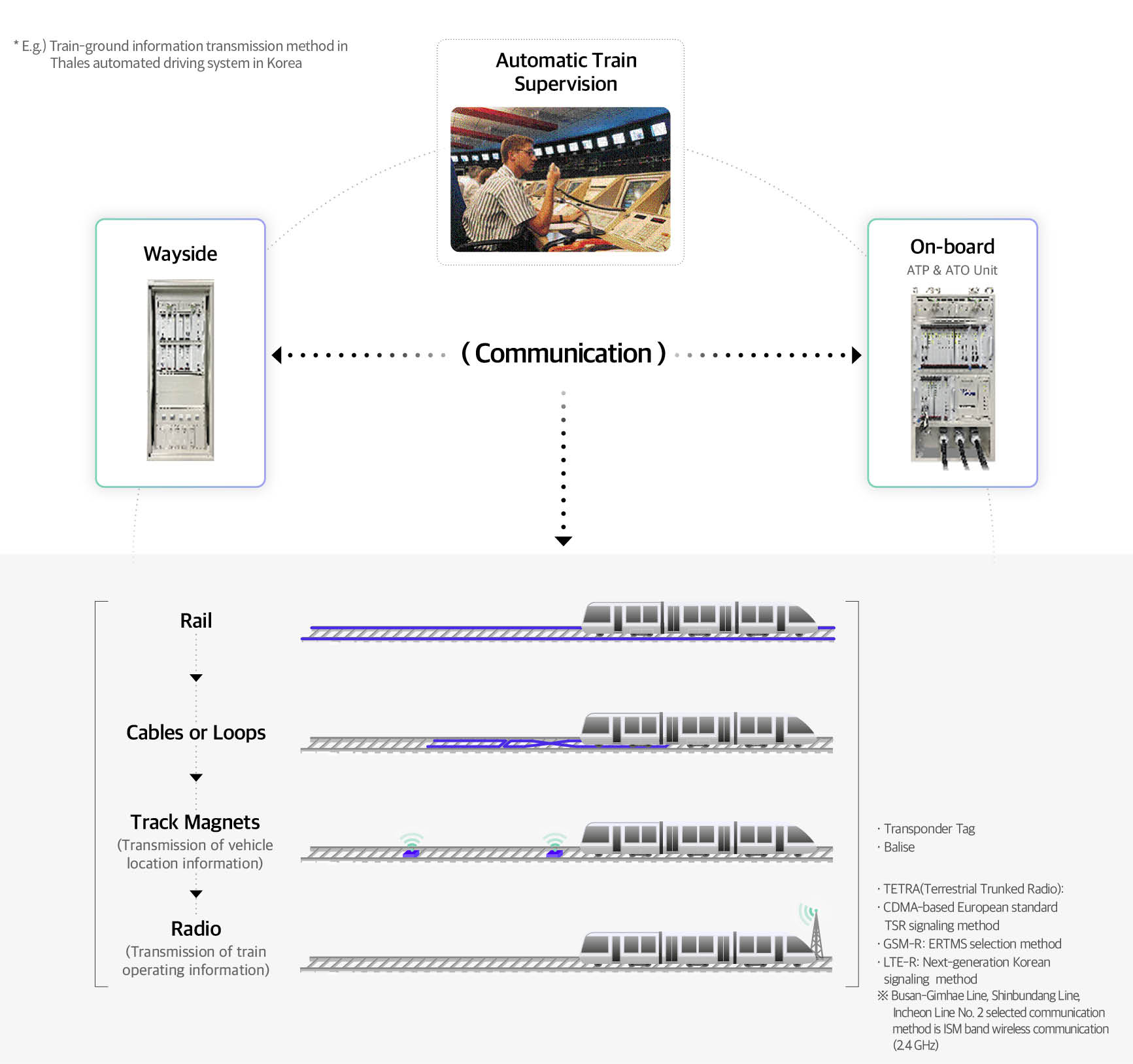
The reason the integrated control center, rather than an onboard driver, controls the train is that the center can sufficiently monitor a variety of information about train operation remotely through train wireless-based communication methods. Because a system of various sensors on the tracks and mutual communication systems between devices inside and outside the train is built, the control center can judge whether the train is moving or stopped based on these and can inform passengers of information relating to train operation. Automated train driving systems can sometimes be confused with vehicle self-driving systems, but self-driving uses Lidar sensors with no human input so the car detects its surroundings and judges situations itself, while automated train driving systems have a person remotely controlling the train from the integrated control center through signaling and wireless systems.
Grades of Train Automation
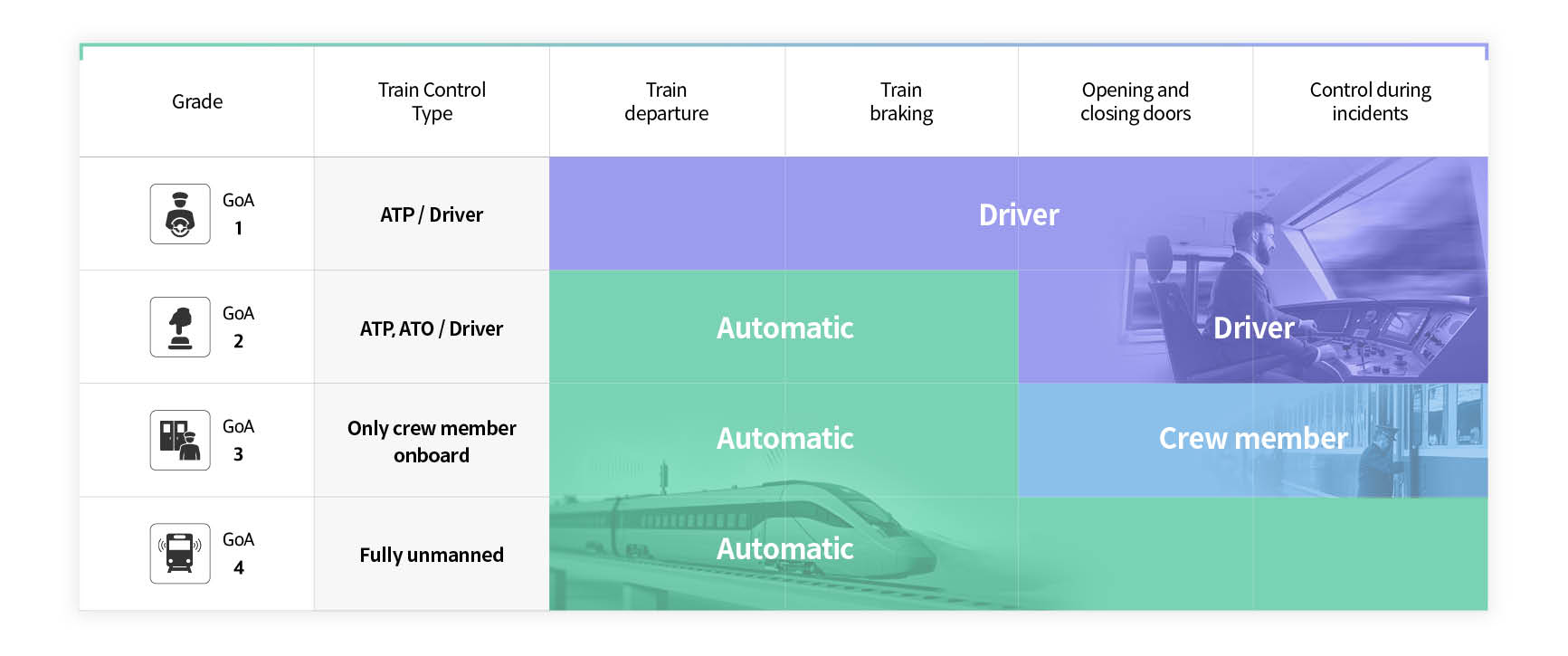
The unmanned train system automation grades are categorized into four stages based on domestic standards (IEC-32290-1) as in the table above.
GoA 1: Usually applied as a fallback operating mode
In the GoA 1 automation stage, a driver monitors the tracks from the front driver’s cabin and must stop the train in dangerous situations. The driver controls accelerating and decelerating based on signals from the onboard signaling system, and the system assists the driver. The driver is naturally also responsible for safe departure from stations, including closing the train doors.
GoA 2: Semi-automated operating mode, STO
In the GoA 2 automation stage, the driver’s role is basically the same as in GoA 1. The difference is that the system automatically accelerates and decelerates as well as monitoring the train’s speed.
GoA 3: Driverless train operation, DTO
In the GoA 3 automation stage, operation is possible even without a driver in the driver’s cabin. The system controls the train’s speed and handles arrival and departure at stops. The system also opens and closes the train doors. However, an onboard operator must intervene in emergency situations.
GoA 4: Unattended train operation, UTO
In the GoA 4 stage, the system controls the train automatically in all situations. Because there is no onboard driver, the system also automatically handles safe departure from stations. When an emergency occurs in this stage, the system can automatically detect and manage emergency conditions.
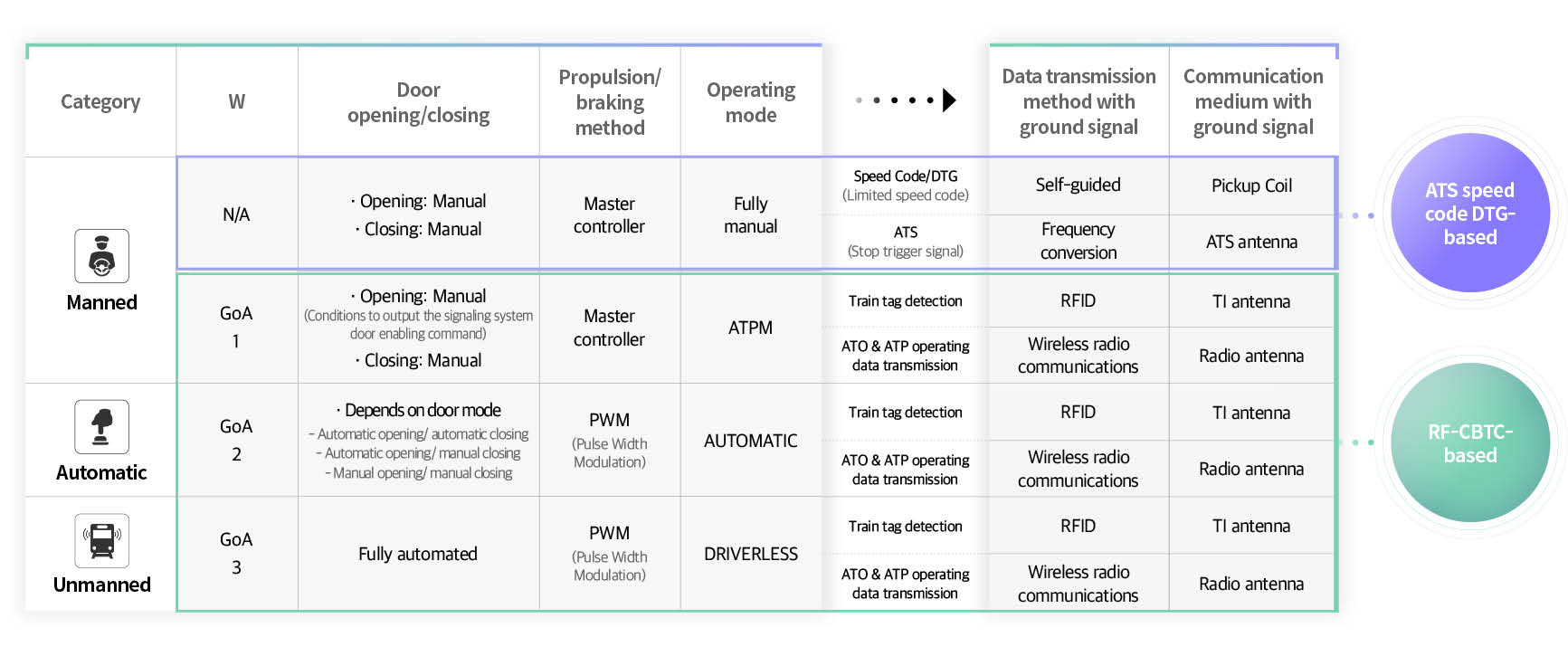
Differences in train operating mode can be categorized as in the picture based on whether or not the driver is on board and the level of direct driver control. If there is a driver, the driver controls most items, but if there is no driver, the system must substitute. There must therefore be a system to control these aspects. If an unmanned train cannot stop in the correct location at the station, train doors are operated according to the following logic. With this method, if the train is 3.125 meters ahead or behind the designated stopping point, it automatically realigns and then the doors open and close.
Train unmanned driving and operating scenarios
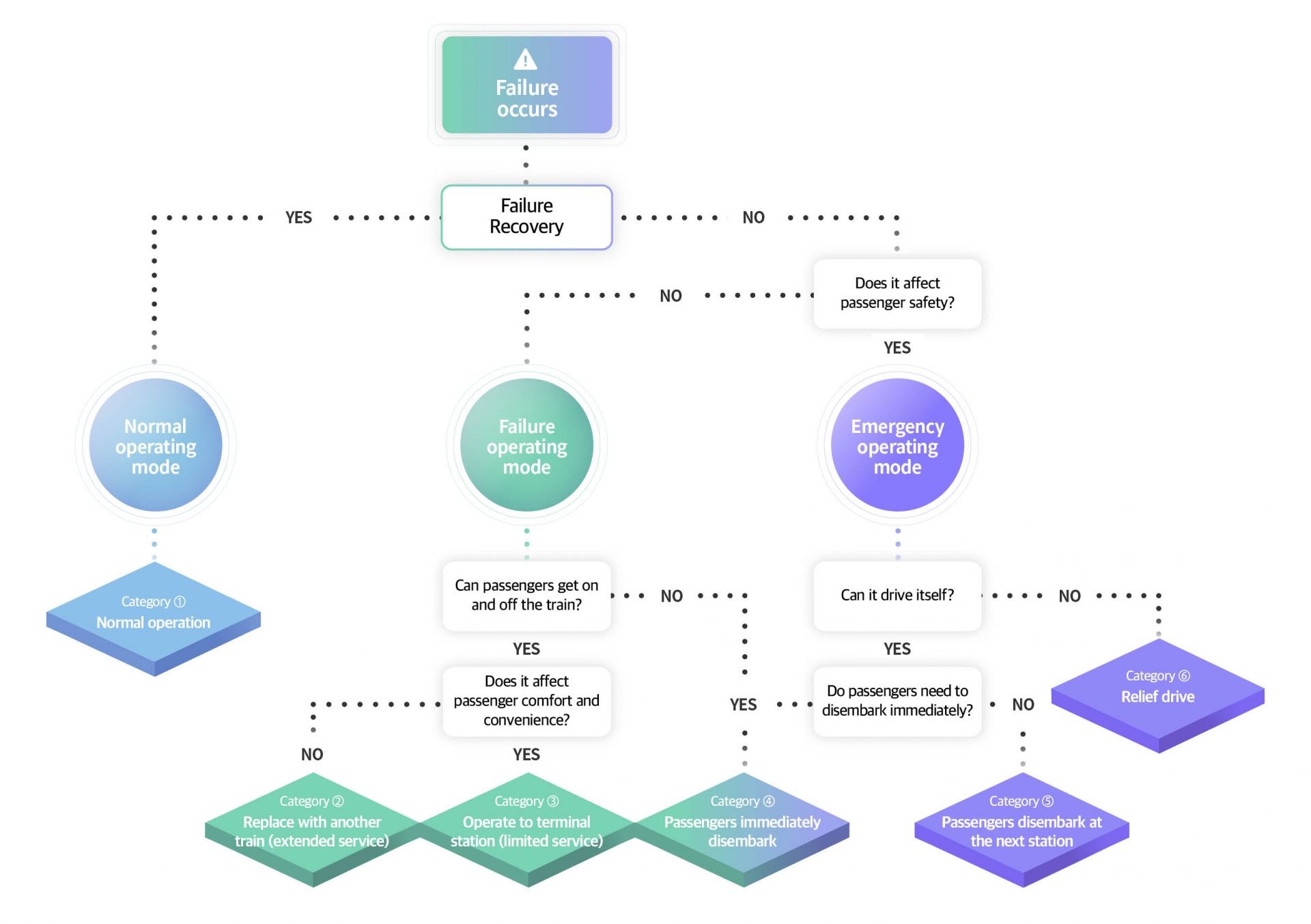
Unmanned train operating scenarios can be categorized into three modes: normal, failure, and emergency. In normal mode, when an event (failure, incident, etc.) occurs, operation can continue if it is minor; if that event is a failure in the vehicle’s systems, the train is recovered through remote control from a central control center or through a driver on the train, then resumes normal operation.
In failure mode, if recovery from the failure is impossible, passenger safety is prioritized. If the failure does not directly affect passenger safety, action is taken quickly according to instructions from the central control center and then the train resumes limited operation. If the failure is in the vehicle’s systems, operation as far as the terminal station is recommended by default, but an extended service to a set station and then replacement with another train may be possible if the failure is deemed to affect passenger convenience. Failure in external vehicle systems mainly occur due to exterior elements, and because the cause cannot be quickly discovered and acted on, service is limited in that section.
Failures in emergency mode directly affect passenger safety, and so these are categorized into passengers disembarking immediately or at the next station depending on the extent of the failure. The train is always sent back to base after passengers disembark. If the train cannot drive itself back to its base after passengers disembark, the steps for a recovery operation are followed.
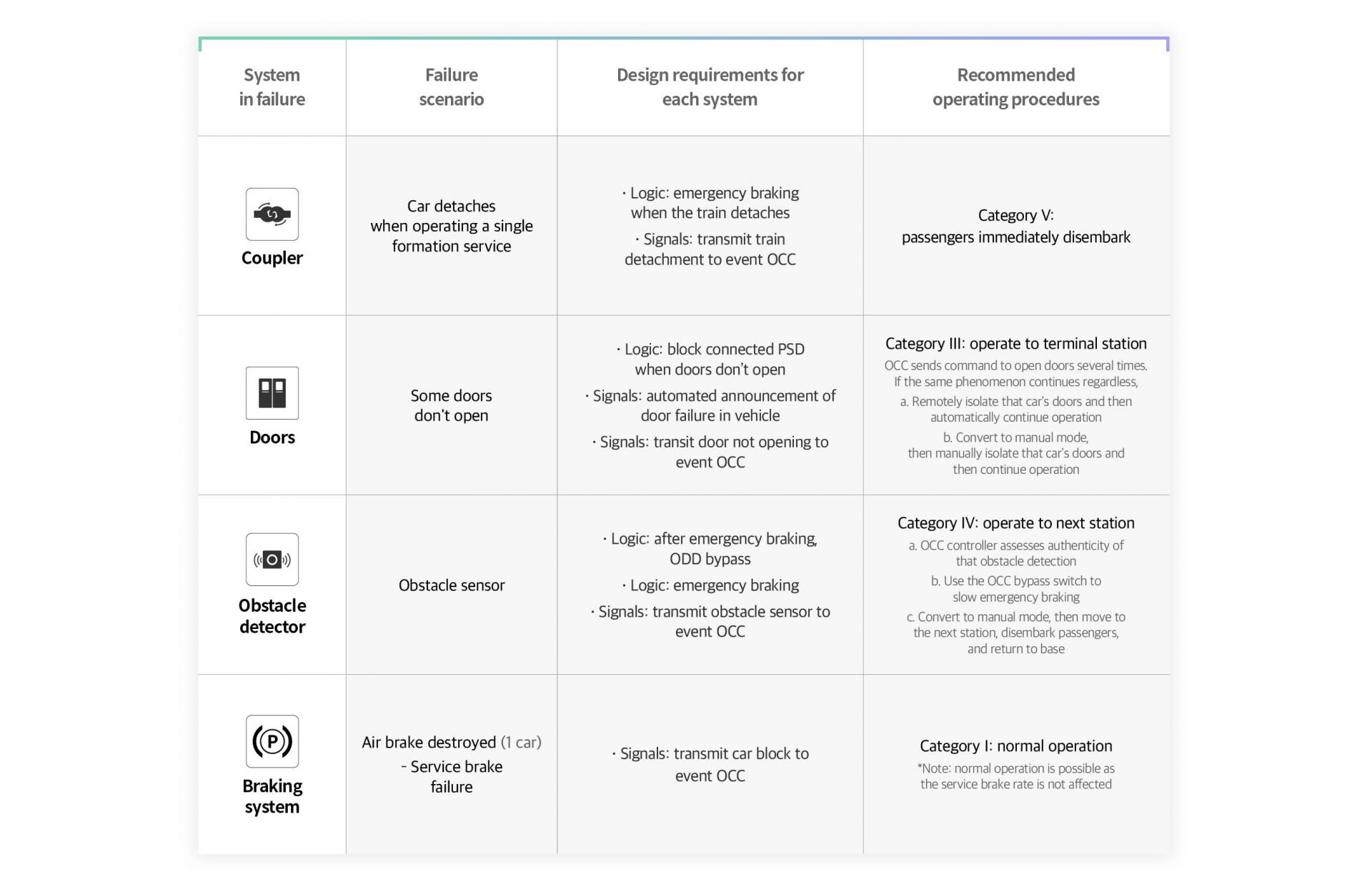
The table below shows the recommended operating procedures for each category for each major failure scenario in failure mode.
When a failure occurs in a railway car unmanned driving system, because there is no driver on board the train, passenger safety must be ensured and a comfortable train usage environment provided via quick action and failure elimination procedures for each situation. For this, the central control center and a driver on (off) the train must cooperate organically to guarantee efficiency. Categorization of operating scenario modes and creation of response procedures for each failure situation are a way to further improve the operating safety of unmanned train driving. For this reason, it is very important to reflect detailed analysis of failure types in the system design phase in requirements for vehicle and signal design and to establish operating procedures to ensure safety quickly on this basis.


